自动驾驶线控底盘整车控制器
1 自动驾驶线控底盘VCU功能介绍
满足自动驾驶及遥控驾驶的线控底盘整车控制器VCU作为新能源及自动驾驶电动汽车的核心主控制单元,通过硬线或CAN等方式与自驾仪、电机控制器MCU、电池管理系统BMS、线控转向、线控制动、线控灯光等系统进行信息交互,通过对接收到的信息的处理,判断各个子控制单元和整车系统的状态,做出合理、安全的指令,从而让各个子控制单元协调、安全的工作,实现自动驾驶电动车系统的功能。
通常整车控制器将需要采集整车档位信号,油门踏板信号,制动踏板信号等驾驶员操作的相关动力输出信号,或接收自驾仪发送的行走、转向、制动、灯光等命令,实现整车驱动。同时,也将监控各个传感器或执行器的工作状态,有效地保护整车及驾驶员的安全。
针对线控底盘系统的VCU具备如下功能,并可进行切换:
- 手动驾驶
- 遥控驾驶
- 自动驾驶
2 线控底盘系统架构
 、
、
3 VCU硬件参数

请参考《PowerECU-S12_产品规格书V1.01》
4 CAN消息群定义
详见DBC文件
5 VCU功能定义
完整典型的VCU控制器架构如图,包括模式/任务调度、控制策略、底层驱动等模块。整车控制策略基于模型的方式开发,利用自动代码生成技术,结合底层驱动生成C代码,并下载在PowerECU硬件平台中。

5.1 功能切换
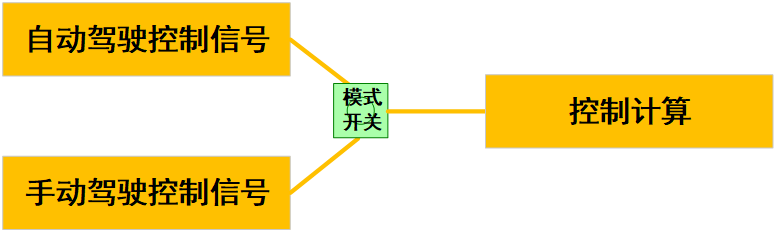
通过模式切换开关切换整车的工作模式,以决定整车控制器的必要的信号来源,包括油门/车速、制动、转向、灯光等信号。
5.2 VCU车辆控制功能
5.2.1 车辆上下电
整车的弱电控制继电器、MCU强电的上下电控制、整车自检,启动完毕则进入到等待状态,指导START信号有效且持续一段时间,则VCU进入到REDAY状态。
如果ON信号为0,则进入关机流程,对MCU下高压,然后自放电,关闭其他电器,对弱电继电器下电。
包括VCU上下电管理以及紧急下电等功能。对MCU高压和主继电器进行管理。在VCU上电时,首先打开主继电器,并对MCU进行预充电,然后打开MCU高压继电器。在任何情况下插入充电器,则进入充电状态,此时车辆不能启动。
5.2.2 能量管理
该模块包括驾驶员意图识别、驾驶模式控制、扭矩协调、功率限制等模块。控制架构如下。
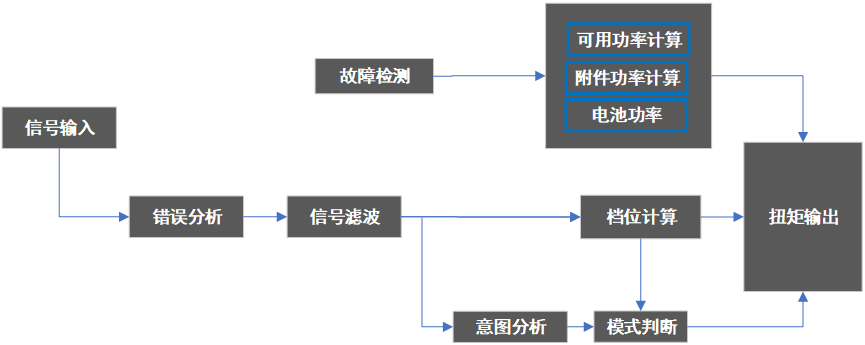
该模块通过驾驶员意图信息,车速信息以及档位信息,控制电机工作在不同模式,实现平稳起步,主要包括蠕行,制动能量回收,滑行能量回收,超速保护等模式。
5.2.3 续航里程估算
续航里程估是在当前驾驶工况下,估算当前SOC下能够继续行驶的里程。算续航里程估算主要包括当前工况下的百公里能量消耗,当前消耗速度下,计算续航里程。
5.2.4 网络管理
在任何情况下,整车控制器与BMS、MCU、自驾仪离线超时,整车控制器将关闭电机控制器输出并通过仪表报警,系统必须钥匙位置“OFF”,使系统复位后方可重新启动运行。若故障保护重复出现,应视为故障。
5.2.5 故障诊断和指示
在任何情况下,MCU或电机、加速踏板、档位、发生严重故障(欠压、过流、严重过热),VUC将MCU转矩清零,上报仪表,提醒司机停车检修。出现故障保护时,系统必须必须钥匙位置“OFF”,使系统复位后方可重新启动运行。若故障保护重复出现,应视为故障。
故障处理包括故障等级划分、故障处理、故障发送.
根据各部件的故障严重程度,划分整车的故障等级。一级为警告,故障码150-200,仪表显示,二级为轻微故障,故障码150-100,降功率可以消除,三级为严重故障,故障码50-100需进一步降功率,或者限功率为0,四级为特严重故障,50-0,关系到行车或者生命安全,需要下高压。
 手机:18610567442(陈先生)座机:0531-88289902
手机:18610567442(陈先生)座机:0531-88289902
 邮箱: support@fuelcellin.com
邮箱: support@fuelcellin.com
 地址: 山东省济南市历下区齐鲁文化创意基地17号楼
地址: 山东省济南市历下区齐鲁文化创意基地17号楼
Copyright © 2026 山东氢探新能源科技有限公司Fuel Cell Power In 版权所有 ICP证:鲁ICP备18036378号